참고 사이트 :
http://www.3demp.com/community/boardDetails.php?cbID=233
라즈베리파이 카메라 모듈 사용하기
이번 포스팅에선 라즈베리파이 카메라에 대해 알아보도록 하겠습니다.사진 출처: https://www.raspberrypi.org/products/camera-module-v2/ 포스팅에서 쓰인 카메라는 카메라 모듈 v2입니다.사진출처: https://www.e
www.3demp.com
1. 카메라가 정상적으로 설치되었는지 확인!
2. catkin_ws/src 폴더로 이동 후 라즈베리 파이 카메라를 위한 ROS 패키지 빌드
git clone https://github.com/UbiquityRobotics/raspicam_node.git -b raspicam_flip
git clone https://github.com/ros-perception/image_transport_plugins.git -b indigo-devel
git clone https://github.com/ros-perception/image_common.git -b hydro-devel
3. caktin_ws 로 이동 후 catkin_make !
빌드가 정상적으로 이루어지면 터미널에서 라즈베리 파이로 접속합니다.
4. 라즈베리파이 터미널에서 sudo raspi-config 명령을 입력

interface options 항목 선택
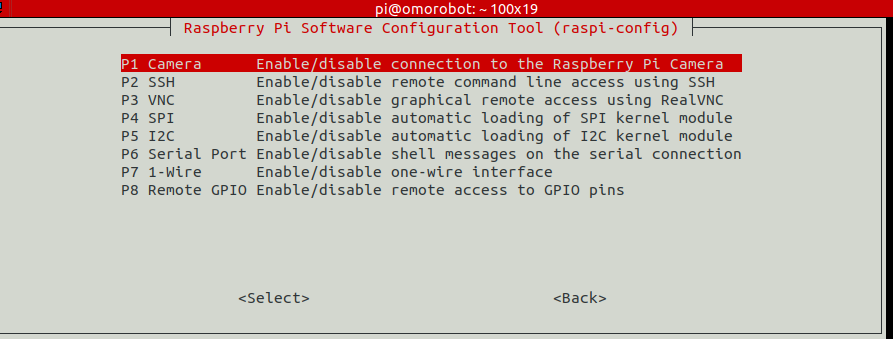
camera 항목 선택

여기에서 yes를 선택해줍니다.

이 화면에서 yes를 선택해주면 초기화면으로 돌아갑니다.
finish 를 선택해줍니다.
설정의 저장을 위해 재시작을 해야하는데, 만약 라즈베리 파이 재시작 확인창이 뜨지 않으면
sudo reboot 를 입력하여 직접 재시작.
테스트를 위해 다음의 명령어를 사용해서 사진을 찍어봅니다.
raspistill -o test.jpg
이후 ls로 해당 경로에 캡쳐파일이 추가되었는지 확인!
(주의! 이 테스트 캡처 과정이 없으면 Raspberry Pi에서 카메라 노드를 실행할 때 해당 카메라의 캘리브레이션 파일이 존재하지 않아서 에러가 발생할 수 있습니다.)
roscore 를 실행한 상태에서 다음 명령어 입력
roslaunch raspicam_node camerav2_1280x960.launch
그 다음 rqt_image_viewer 명령어로 화면을 띄우면 영상을 확인할 수 있습니다.
만약 영상이 뒤집혀서 나오는 경우 camerav2_1280x960.launch 파일을 열어 다음 항목을 수정합니다.
<arg name="vFlip" default="true"/>
'ROS' 카테고리의 다른 글
| ros 마스터를 향한 길은 멀고도 험하다 (1) 백업용 (0) | 2023.03.29 |
|---|---|
| ROS melodic rosbridge 웹소켓으로 연결 참고 사이트 (0) | 2023.03.08 |
| omorobot r1mini (1) gazebo 환경에서 실행, 카메라 각도 변경 (0) | 2023.03.06 |
| ROS setting Ubuntu 18.04.6 USB 설치하는 법 (0) | 2023.03.06 |